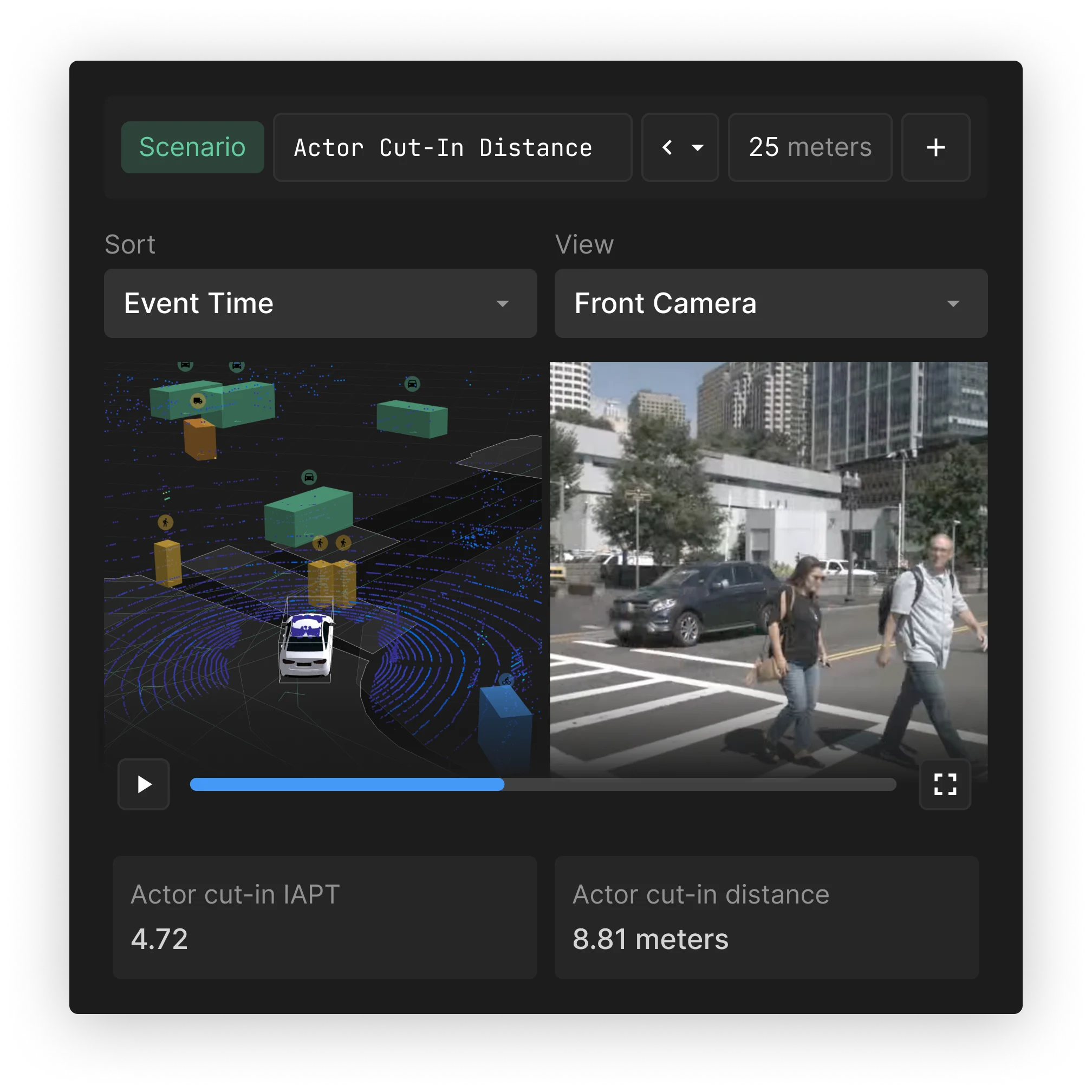
로그 데이터를 빠르게 분류하여 중요한 개발 작업에 집중하세요.
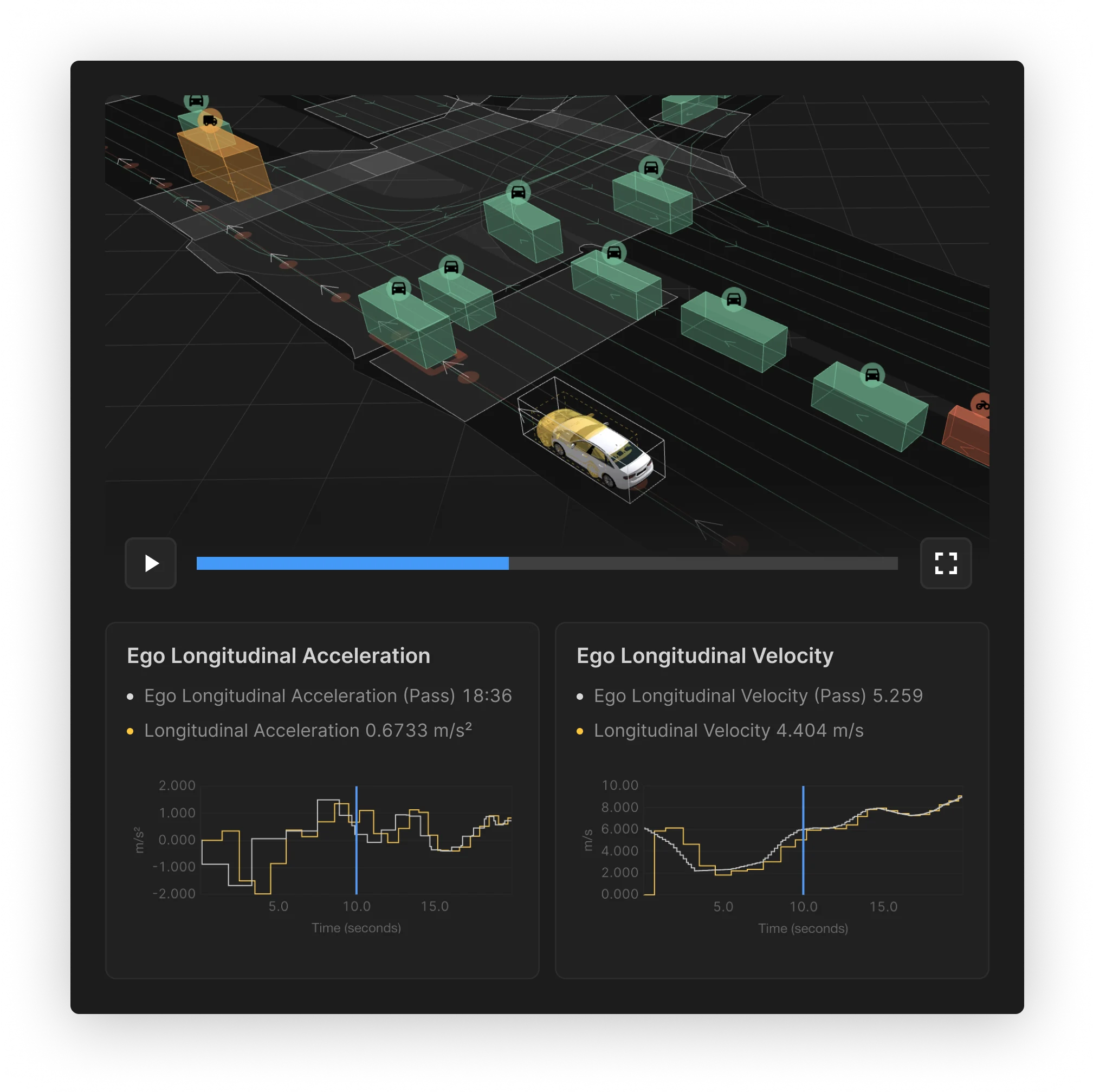
실제 제약 없이 안전이 중요한 상황과 엣지 케이스를 테스트하세요.
시뮬레이션을 사용하여 실제 테스트의 지연과 비용을 줄이세요.








.webp)
.webp)
